Arc-Length Parametrization
A curve in can be described by many different parametrizations --- functions that assign a position vector to each value of a parameter , tracing out the same geometric shape as varies over some interval. The problem: different parametrizations trace the same curve at different speeds. A circle can be traversed leisurely or at breakneck pace, and the parameter gives no intrinsic information about how far along the curve you have traveled.
Arc-length parametrization solves this by reparametrizing the curve so that the parameter is the distance traveled. One unit of parameter change equals one unit of distance along the curve. This is the canonical parametrization --- the one that strips away all arbitrary choices about speed and gives the curve a natural “odometer.”
Speed of a parametrized curve
Given a curve (a vector-valued function mapping to position vectors in ; see Position Vectors and Coordinate-Free Geometry for the position vector concept), the velocity vector at time is the derivative
which points in the direction of motion and whose magnitude encodes how fast the point moves. The speed is the magnitude of the velocity vector:
Here denotes the Euclidean norm --- for a vector , . Speed is always non-negative. A parametrization is called regular if for all in the domain --- the curve never stops. We assume regularity throughout this note, because a curve that stops momentarily cannot be smoothly reparametrized by arc length at the stopping point.
Speed depends on the parametrization, not the curve
The same circle parametrized as has speed 1, while has speed 2. The geometric curve is identical; only the “clock” driving the traversal differs. Arc-length parametrization eliminates this ambiguity.
Arc length
The arc length of a curve from to is the total distance traveled along the curve:
This formula comes from the same idea as computing distance from speed in one dimension (), generalized to curves in .
More useful for reparametrization is the arc-length function , which measures the distance traveled from the starting point up to parameter value :
Key properties of :
- : no distance traveled at the start.
- is strictly increasing: since (regularity), the integrand is positive, so . A function with a strictly positive derivative is strictly increasing.
- is invertible: a strictly increasing continuous function has a well-defined inverse , mapping each arc-length value back to the corresponding parameter value.
Why reparametrize by arc length?
Before diving into the mechanics, consider why you would want to use distance as the parameter instead of .
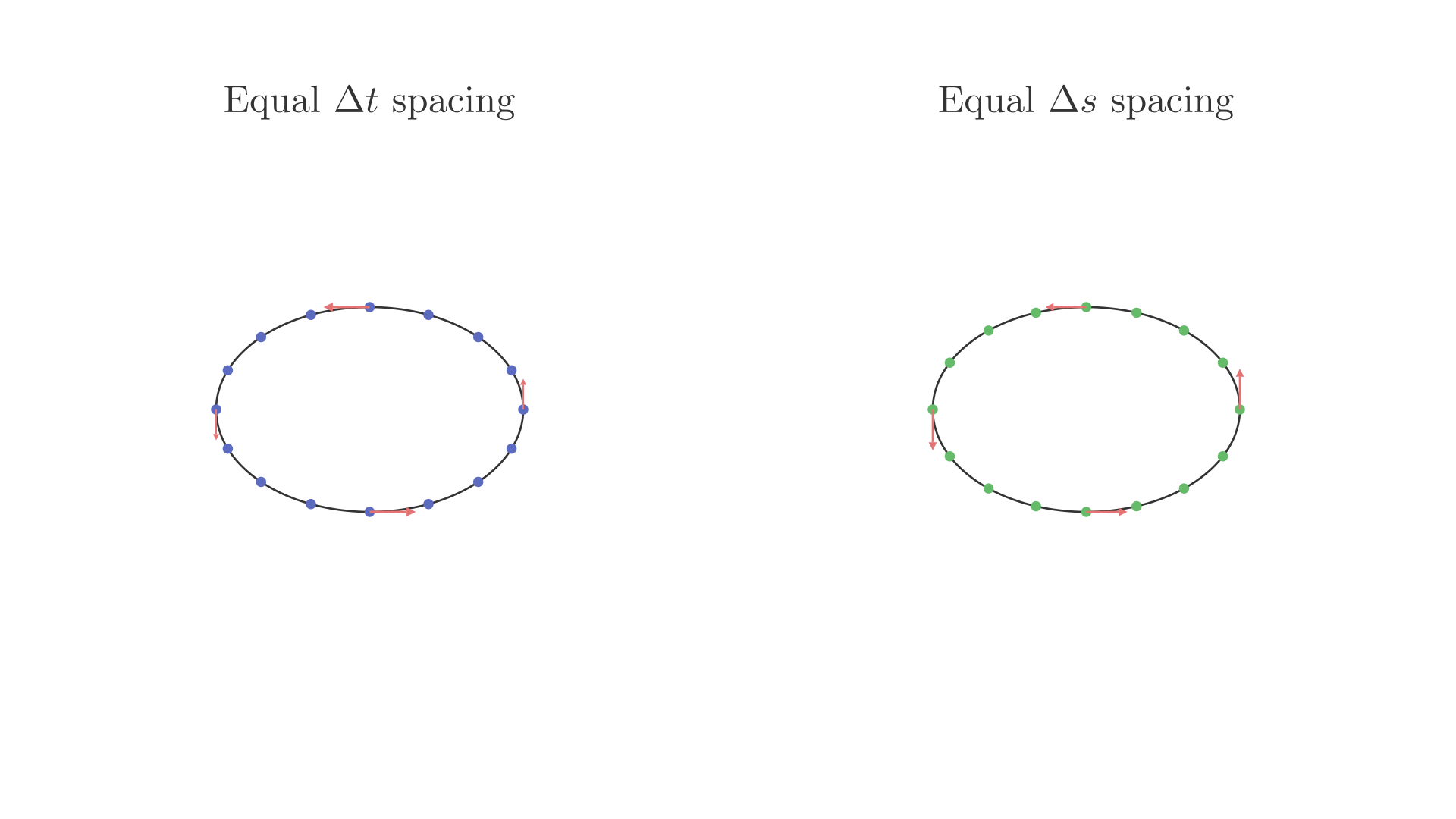
The parameter is arbitrary. When someone hands you a curve for , the value does NOT mean “halfway along the curve.” It means “halfway through the parameter range,” which could correspond to a point near the start, near the end, or anywhere --- it depends entirely on how the parametrization was chosen. Equal increments of produce unequally spaced points along the curve.
The diagram below shows this concretely on an ellipse. Left: equal increments of crowd points near the tight ends and spread them out on the flat sides. Right: equal increments of arc length produce evenly spaced points, and all velocity arrows have the same length.
The problem: bending rate depends on the clock
Suppose you want to measure how sharply a curve bends. A natural first attempt: compute how fast the direction of changes, i.e., look at . But this mixes together two effects --- how fast the curve actually turns and how fast the parametrization drives you along it.
Concrete example. Take the unit circle with two different parametrizations:
- , speed . Compute , so .
- , speed . Compute , so .
The geometric curve is the same circle, bending the same way at every point. But gives 1 for one parametrization and 9 for the other --- it is measuring the parametrization, not the curve. You cannot define “bending” using because the answer changes if you speed up or slow down the clock.
Arc-length parametrization fixes this: when the speed is always 1, the only reason is nonzero is that the curve is actually turning. All the “clock speed” contamination is gone. This is why curvature is defined as (see the Curvature section below).
What arc-length parametrization gives you
Arc-length parametrization makes the parameter meaningful: means “the point 3 units of distance along the curve from the start.” The curve becomes its own ruler. This matters for:
- Curvature: measuring how sharply a curve bends requires knowing how fast the direction changes per unit distance, not per unit of some arbitrary . The example above shows why.
- Directional derivatives: the rate of change of a function per unit distance in a direction (see the straight-line case below).
- Canonical description: every regular curve has a unique arc-length parametrization (up to starting point and direction), so it removes the ambiguity of arbitrary parametrizations.
Reparametrization by arc length
The idea: we have a curve parametrized by , and we have the function that converts values to distances. Since is invertible, we can go the other way: given a distance , find the corresponding via . Then substitute back:
This is the arc-length parametrization. The function traces the same geometric curve as , but now the input is distance traveled rather than the original parameter . We use (with a tilde) to distinguish it from the original --- they describe the same curve but are different functions with different inputs.
The key result: unit speed
The defining property of arc-length parametrization is that the speed is always exactly 1.
Unit-speed property
If is the arc-length parametrization of a regular curve, then for all . The curve is traversed at constant unit speed.
Derivation. Apply the chain rule (see Derivatives, Differentials, and the Chain Rule for the single-variable chain rule; the same rule applies component-wise to vector-valued functions):
We need . Since , the Fundamental Theorem of Calculus gives
By the inverse function theorem (a strictly monotone differentiable function has a differentiable inverse, and the derivative of the inverse is the reciprocal of the original derivative):
Substituting:
Taking the magnitude:
The unit tangent vector
The vector is not just unit-length --- it points in the direction of motion. This vector has a name: the unit tangent vector, commonly written
For any regular parametrization, gives the direction of the curve at each point, normalized to length 1. Arc-length parametrization is special because directly --- no normalization needed.
Worked example: the circle
Consider the circle of radius centered at the origin in .
Step 1: Start with an arbitrary parametrization.
Step 2: Compute the velocity and speed.
The speed is constant: . This makes sense --- the standard parametrization traverses a circle of radius at constant speed . For , it is already unit-speed; for , it is not.
Step 3: Compute the arc-length function.
At , the total arc length is , which is the familiar circumference formula.
Step 4: Invert to get .
Step 5: Substitute to get the arc-length parametrization.
Step 6: Verify .
The arc-length parametrization of a circle of radius replaces the angular parameter with the distance parameter . Each unit of corresponds to one unit of arc traveled.
Special case: straight lines
A straight line through point in the direction of a unit vector (a vector with ) can be parametrized as
Here is the position vector of the starting point (see Position Vectors and Coordinate-Free Geometry).
This is already an arc-length parametrization. Verify:
The derivative is constant (the direction never changes) and has unit magnitude. The parameter measures signed distance from along the line: moves in the direction of , moves opposite.
Straight lines and directional derivatives
This parametrization is exactly the one used to define directional derivatives. To compute the rate of change of a scalar function at a point in the direction , we evaluate along the line and differentiate with respect to at : The requirement that be a unit vector ensures measures actual distance, so is the rate of change of per unit distance in direction . If were not unit-length, the derivative would scale with and lose its geometric meaning.
Curvature: the payoff
Arc-length parametrization is rarely used for explicit computation --- inverting analytically is usually impossible (it requires solving an integral equation). Its value is theoretical. The most important application is curvature: a scalar measuring how sharply a curve bends at each point.
where is the unit tangent vector. Since , the derivative measures only the change in direction (not speed), making a pure geometric invariant. A straight line has (direction never changes); a circle of radius has (tighter circles bend more sharply).
This is why arc-length parametrization exists: it lets you define curvature as “change in direction per unit distance traveled,” which is the natural geometric quantity. Without it, you would need to disentangle direction changes from speed changes, which is messy and parametrization-dependent.
See also
- Position Vectors and Coordinate-Free Geometry --- position vectors and affine combinations, prerequisite for parametrized curves
- Derivatives, Differentials, and the Chain Rule --- derivatives of scalar and vector-valued functions, chain rule used in the unit-speed derivation
- Tangent Vectors and the Unit Normal on Graph Surfaces --- tangent and normal vectors for surfaces, extending the tangent vector idea from curves to higher dimensions
- Directional Derivatives and the Gradient --- uses the straight-line arc-length parametrization to define rates of change in arbitrary directions