Position Vectors and Coordinate-Free Geometry
Coordinate-free geometry is a proof technique: instead of assigning coordinates to every point and grinding through component algebra, you fix an arbitrary origin , represent each point by its position vector from , and derive results using only vector addition and scalar multiplication. Because no coordinate axes appear, the proofs work identically in , , or and expose the geometric reasoning that coordinates obscure.
This note introduces the technique and then applies it to a complete example: proving that the three medians of a triangle meet at a single point and deriving the ratio from scratch.
What is a position vector?
A point in space is a location --- it has no magnitude, no direction. A vector is a displacement --- it has magnitude and direction but no fixed location. These are different objects.
To bridge the two, pick any point and call it the origin. Given a point , the position vector of (with respect to ) is the vector
which is the displacement from to . Once you fix an origin, every point in space has a unique position vector, and every position vector corresponds to a unique point. The origin itself has position vector (the zero vector --- the vector with magnitude zero).
The origin is arbitrary
Nothing in the theory requires a specific origin. Different origins produce different position vectors for the same point, but --- as we will see --- the geometric relationships between points remain unchanged. This origin-independence is what makes the approach powerful.
For brevity, we write for , for , and so on. The boldface letter denotes the position vector of the point named by the corresponding capital letter.
Vector between two points
Given two points and with position vectors and , the displacement vector from to is
This follows from the vector addition identity , rearranged. No coordinates are needed --- just subtraction of position vectors.
Reading the notation
is a displacement: “the vector that takes you from to .” The order matters: .
The midpoint formula
The midpoint of segment is the point that lies exactly halfway between and . Formally, .
We derive the position vector of :
Expanding:
The position vector of the midpoint is the average of the endpoint position vectors.
Numerical check. If is at the origin of a coordinate system, , and , then , , and , which is indeed the midpoint of the segment from to .
Affine combinations
The midpoint formula is a special case of a more general construction. To see it, we first need the word affine.
In linear algebra, a linear combination of vectors is any expression with no constraint on the coefficients. An affine combination adds one constraint: the coefficients must sum to 1.
Why does this constraint matter? Because position vectors depend on the choice of origin. If you switch from origin to a different origin , every position vector changes: , where . A general linear combination would shift by under this change of origin --- it gives a different answer depending on which origin you picked. But when , the shift is , which is exactly how a position vector of a point transforms. The result is a well-defined point, independent of the origin.
Affine = "coefficients sum to 1"
The word “affine” comes from affine geometry --- the geometry of points, lines, and parallelism, where you can talk about “betweenness” and “ratios” but not about distances or angles. Every time you see “affine” in this note, it means: linear combination with coefficients summing to 1.
Dividing a segment
A point dividing segment in the ratio (where means is fraction of the way from to ) has position vector
Derivation. is at fraction along , so . Then:
The coefficients and sum to 1 --- this is an affine combination of two position vectors. When , ; when , ; when , is the midpoint.
From two points to many
The segment formula combines two position vectors. But affine combinations work with any number of position vectors, as long as the coefficients sum to 1. For points with position vectors :
The result is the position vector of a new point . Where lands depends on the coefficients:
| Coefficients | Result | |
|---|---|---|
| 2 | Midpoint of segment | |
| 2 | Point of the way from to | |
| 3 | Centroid --- the equal-weight average of three points |
The jump from to is just “add another term and keep the coefficients summing to 1.” There is nothing deeper happening.
When do three points form a triangle?
The centroid formula gives a well-defined point for any three points , , . But we call it “centroid of a triangle” only when , , actually form a triangle, which requires them to be non-collinear (not all on the same line).
You might wonder: doesn’t the triangle inequality decide this? Not quite. The triangle inequality says that for any three points:
This is always true --- it is an axiom of distance, not a condition that selects special points. Every triple of points satisfies it automatically. The question is only whether equality holds:
- Strict inequality (): the three points form a non-degenerate triangle (positive area).
- Equality (): the three points are collinear --- they lie on a line, and the “triangle” has zero area.
For the centroid proof below, we need the non-degenerate case: three points that are not all on the same line. In the language of affine geometry, such points are called affinely independent.
Affine independence
Two points are affinely independent if they are distinct (not the same point). Three points are affinely independent if they are not collinear. In general, points are affinely independent if none of them can be written as an affine combination of the others.
Why does this matter? In the centroid proof below, we will set two affine combinations equal and conclude that their coefficients must match. This step --- “if and the coefficients on each side sum to 1, then , , ” --- is only valid when , , are affinely independent. If they were collinear, the same point could be represented by different affine combinations, and the proof would break.
The centroid as an affine combination
The centroid of a triangle is the point such that
The three coefficients , so this is an affine combination of the position vectors of , , . But why is defined this way? The next section derives it from the medians of the triangle --- the formula above is the result, not the starting point.
Coordinate-free proof: medians meet at a point
A median of a triangle is the line segment connecting a vertex to the midpoint of the opposite side. Every triangle has three medians. The claim: all three medians pass through a single point (they are concurrent --- meaning they all intersect at one common point), and that point divides each median in the ratio from the vertex.
The diagram below shows the triangle with its three medians (dashed blue), midpoints , , , and the centroid where they meet. The tick mark on the median from to marks the point.
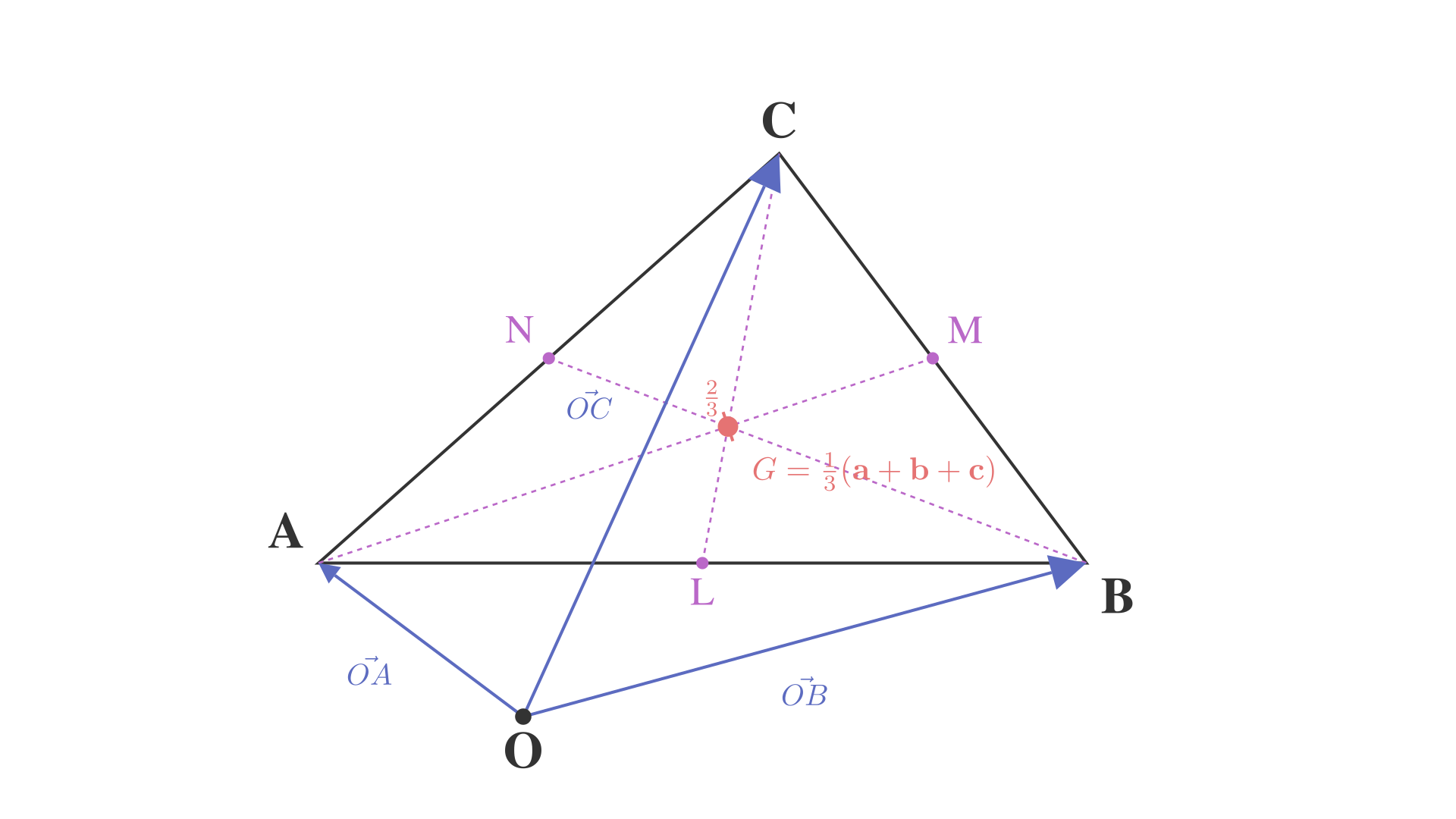
We prove this without coordinates.
Setup
Let triangle have vertices with position vectors , , . Define the midpoints:
- = midpoint of :
- = midpoint of :
- = midpoint of :
Parametrize two medians
Median from to . A point on this median at parameter (where gives and gives ):
Median from to . A point on this median at parameter (where gives and gives ):
Solve for the intersection
The medians intersect where . Expanding both sides:
Setting and collecting coefficients of , , :
| Vector | Coefficient in | Coefficient in |
|---|---|---|
Since , , form a triangle, they are affinely independent (see the definition above). This means two affine combinations of , , can only be equal if their coefficients match. Setting the coefficients equal:
From the third equation: , so .
Substituting into the first equation: , which gives , so:
And therefore as well.
The 2/3 is derived, not assumed
The parameter value emerges from solving the system. It is a consequence of the midpoint formula and the parametrization --- not a fact that needs to be memorized.
Compute the intersection point
Substituting into :
Therefore:
This is the centroid of the triangle --- the “center of mass” if the triangle has uniform density.
Verify the third median
The third median goes from to (midpoint of ). Parametrize it:
At :
All three medians pass through , each at parameter from the vertex. Since parameter means the point is of the way from the vertex to the opposite midpoint, divides each median in the ratio from the vertex.
The MIT 18.02 formula as a consequence
MIT 18.02 (Multivariable Calculus, Fall 2007, taught by Denis Auroux at MIT --- Massachusetts Institute of Technology) states the centroid formula as , where is the midpoint of . This is just the parametrization evaluated at :
The formula is correct, but it is a consequence of the median intersection proof, not a starting axiom.
Why “coordinate-free”?
The entire derivation above used no coordinates --- no , , or components. Every step relied only on:
- Position vectors: mapping points to vectors via a chosen origin.
- Vector addition and scalar multiplication: the basic operations of a vector space.
- Affine combinations and independence: the “coefficients sum to 1” rule for points, and the fact that three non-collinear points have unique affine representations.
This means the proof works identically in , , or any . It does not depend on a coordinate system, only on the vector space structure (the ability to add vectors and multiply them by scalars). A coordinate-based proof --- setting , , and grinding through component equations --- would give the same result, but it would obscure the geometric reasoning and fail to generalize beyond without additional work.
When to use coordinate-free methods
Coordinate-free proofs are most useful when the result is purely geometric (it does not depend on orientation or scale) and involves affine or linear relationships. They become less practical for problems involving specific distances, angles, or curves defined by equations in particular coordinate systems.
See also
- Position vectors, distance and normalization --- norms, unit vectors, and radial/tangential directions
- Arc-Length Parametrization --- reparametrization by distance, using position vectors to define curves
- Derivatives, Differentials, and the Chain Rule --- rates of change of vector-valued functions, chain rule